成都纵横科宇自动化技术有限公司招聘简章
简历接收邮箱:13699009936@139.com
联系电话:13699009936
需求专业:机械电子工程 测控技术与仪器
一、成都纵横科宇自动化技术有限公司是四川纵横测控技术股份有限公司下属的机电工程部独立核算而成立的公司,是专业从事定制化的大型精密机械工程和通用精密机电产品研制开发的公司,该公司有完整的机构设计管理规范和管理制度。工程技术人员大都来自航空、航天、机械部等科研单位,有丰富的机构设计经验。
纵横科宇公司自成立以来,始终本着“技术领先、创新求发展”的宗旨,并结合测控行业的先进技术及优质产品为航空航天、军队、电子工业、船舶工业、科研院所等领域用户提供了一系列机电一体化系统。
二、公司性质:民营企业
三、福利待遇及休假:公司统一购买五险一金,按照国家法定假日休假,年底双薪;每周五天工作制,早上9:00-12:00,下午13:00+-17:30上班,加班按基础工资计算加班工资。
四、纵横公司设计开发的主要项目
为兵器工业研究所研制五轴仿真转台、三轴仿真转台、两轴速率转台、稳定平台等项目;为研究所和高校设计各种转台和试验台,直升机六自由度旋翼试验台、六自由度液压摇摆台、无人机自动起降智能仿真系统;为总装常规兵器试验基地研制弹丸静态特征量测试设备、弹药结构特征量测量系统;为总装空气动力研究中心设计1.2m跨超音速风洞六自由度位置控制机构、2.4m跨超音速风洞六自由度速度控制机构、3.2m低速风洞六自由度多功能支撑机构;为中航工业空气动力研究院研制8米低速风洞多功能尾撑系统、FL-3六自由度CTS机构;为研究所提供了某型飞机综合测试系统、直升机机载电子设备测试系统、导弹综合测试系统、装甲车综合测试系统。以上项目获得了使用方的认可和好评,部分项目还获得了军队科技进步奖。
转台
速率转台主要用于惯性系统及惯性器件的角速率测量,采用电机直驱或间接驱动的形式,由计算机进行状态控制和数据采集,并通过串行接口与上位机通讯,采用位置、速率、摇摆的控制方式,可单轴运动也可多轴联动。产品符合GJB1728-93《速率转台通用规范》的规定,分为Ⅰ、Ⅱ、Ⅲ级转台。
技术特点:
位置、速率控制和摇摆的工作方式
具有位置快速粗定位和微调精确定位功能
可单轴运动、两轴联动、三轴联动
单轴速率转台系列技术指标
项目 | Ⅰ级 | Ⅱ级 | Ⅲ |
台面尺寸 | Φ160mm | φ360mm | Φ560mm |
台面平面度 | GB4986 00级 | GB4986 0级 | GB4986 Ⅰ级 |
台面跳动量 | 0.003mm | 0.02mm | 0.05mm |
倾角回转误差 | ±1″ | ±3″ | ±20″ |
转角范围 | 连续 | 连续 | 连续 |
工作方式 | 位置、速率 | 位置、速率 | 位置、速率 |
角位置测量精度 | ±1″ | ±3″ | ±10″ |
角位置测量重复性 | ±0.5″ | ±2″ | ±4″ |
角位置控制精度 | ±5″ | ±5″ | ±12″ |
速率范围 | 0.0001° ~ 200°/s | 0.005° ~ 400°/s | 0.01° ~ 720°/s |
速率精度 | 1×10-5 (360°平均) | (2~5)×10-5 (360°平均) | 5×10-4 (360°平均) |
两轴速率转台系列技术指标
项目 | Ⅰ级 | Ⅱ级 | Ⅲ级 | |
转角范围 | 内环 | 连续旋转 | 连续旋转 | 连续旋转 |
外环 | 连续旋转 | 连续旋转 | 连续旋转 | |
角位置测量精度 | 内环 | ±1" | ±3" | ±10" |
外环 | ±1" | ±3" | ±10" | |
角位置测 量重复性 | 内环 | ±0.5" | ±2" | ±4" |
外环 | ±0.5" | ±2" | ±4" | |
角位置测 量分辨率 | 内环 | ±0.36" | ±0.36" | ±0.72" |
外环 | ±0.36" | ±0.36" | ±0.72" | |
速率范围 | 内环 | 0.001-720º /s | 0.01-720º /s | 0.01-400º /s |
外环 | 0.001-400º /s | 0.01-400º /s | 0.01-200º /s | |
速率精度 | 内环 | 1×10-5(360°平均) | 5×10-5(360°平均) | 5×10-4(360°平均) |
外环 | 1×10-5(360°平均) | 5×10-5(360°平均) | 5×10-4(360°平均) | |
速率平稳性 | 内环 | 1×10-5(360°平均) | 5×10-5(360°平均) | 5×10-4(360°平均) |
外环 | 1×10-5(360°平均) | 5×10-5(360°平均) | 5×10-4(360°平均) | |
两轴垂直度 | ±2" | ±6" | ±30" | |
倾角回转误差 | ±1" | ±5" | ±20" | |
工作方式 | 位置、速率、摇摆 | 位置、速率、摇摆 | 位置、速率、摇摆 | |
联动功能 | 单轴转动、两轴联动 | 单轴转动、两轴联动 | 单轴转动、两轴联动 | |
三轴速率转台系列技术指标
项目 | 指 | |
转角范围 | 俯仰 | 连续旋转 |
偏航 | 连续旋转 | |
滚转 | 连续旋转 | |
最大角 加速度 | 俯仰 | 0~100°/S2 |
偏航 | 0~100°/S2 | |
滚转 | 0~350°/S2 | |
最大角 速度 | 俯仰 | ±0~60°/s |
偏航 | ±0~60°/s | |
滚转 | ±0~350°/s | |
角速度控制精度 | ≤0.2°/S | |
角速度输出精度 | ≤0.1° | |
角位置控制精度 | ≤0.2° | |
工作方式 | 位置、速率、摇摆 | |
联动功能 | 单轴转动、两轴联动,三轴联动 | |
负载 | 1 | |


位置转台主要用于惯性系统和惯性器件的各种试验,也可用于雷达天线测试,雷达整机调测试。控制/测量系统由主控计算机、运动控制器、伺服/执行控制器和安全保护装置组成,完成试验中机构的运动控制。产品分单轴、两轴、三轴位置转
技术特点:
配备用于角度数据显示的角度数字显示表和标准的串行通讯接口;
可手动也可电动运行;
可作单轴转动,两轴联动,三轴联合转动;
转动过程中或方向定位后,被测物的姿态和位置能够反馈;
三轴手动位置转台系列技术指标
项目 | Ⅰ级 | Ⅱ级 | Ⅲ级 |
承载能力 | 10kg | 20kg | 30kg |
台面尺寸 | φ260mm | Φ360mm | Φ460mm |
台面平面度 | 0.01mm | 0.02mm | 0.05mm |
台面跳动量 | 0.01~0.03mm | 0.01~0.03mm | 0.01~0.03mm |
倾角回转误差 | 内框±2″,外框±3″ | 内框±4″,外框±5″ | 内框±5″,外框±8″ |
转角范围 | 连续 | 连续 | 连续 |
工作方式 | 位置 | 位置 | 位置 |
转台重量 | 约120kg | 约150kg | 约150kg |
角位置测量精度 | 内框±4″,外框±5″ | 内框±5″,外框±10″ | 内框±10″,外框±20″ |
角位置测量重复性 | 内框±2″,外框±3″ | 内框±3″,外框±5″ | 内框±5″,外框±10″ |
数显表接口 | RS232 | RS232 | RS232 |
导电环 | 12道×2A |
三轴电动位置转台系列技术指标
项目 | Ⅰ级 | Ⅱ级 | Ⅲ级 | |
转角范围 | 俯仰 | ± 20° | ± 20° | ±45° |
偏航 | ±180° | ±180° | ±180° | |
滚转 | ±45° | ±45° | ±45° | |
最大角 加速度 | 俯仰 | 40°/S2 | 40°/S2 | 80°/S2 |
偏航 | 40°/S2 | 40°/S2 | 80°/S2 | |
滚转 | 40°/S2 | 40°/S2 | 80°/S2 | |
最大角 速度 | 俯仰 | ±25°/s | ±25°/s | ±45°/s |
偏航 | ±25°/s | ±25°/s | ±45°/s | |
滚转 | ±25°/s | ±25°/s | ±45°/s | |
角速度输出精度 | ≤±0.01°/s | ≤±0.03°/s | ≤±0.1°/s | |
角位置控制精度 | ≤±0.01° | ≤±0.02° | ≤±0.05° | |
工作状态 | 位置状态、速率状态 | |||
控制模式 | 正弦波、三角波;幅值、频率可调 | |||
负载 | 20Kg | |||



仿真转台是一个由计算机实时控制并能提供多自由度运动的仿真设备,是飞行控制系统进行地面仿真的关键设备。
可用来复现飞机和导弹的姿态角运动,供综合测试和物理仿真;
可实时模拟弹和目标在各种飞行状态下的姿态,并模拟弹和目标在飞行过程中的相互关系;
可作为飞行模拟器、坦克火炮模拟器、汽车模拟器、动感影院模拟平台等。
三轴仿真转台是一种三轴框架式、机械轴系的实验设备,是飞行控制系统进行地面仿真的关键设备,用来复现飞机和导弹的姿态角运动,供综合测试和物理仿真。主要由内框、中框、外框、导电滑环等组成。转台采用低速直流力矩电机直接驱动,速度反馈采用高灵敏度直流低速测速机,位置反馈采用高精度圆光栅,以保证速度和位置精度。计算机完成对三轴姿态转台的工作方式设置、状态数据查询等控制,其中工作方式分为位置、速率和仿真。
技术指标
项目 | Ⅰ级 | Ⅱ |
承载能力 | 20kg | 定制 |
台面 | 框架式结构 | 框架式结构 |
倾角回转误差 | ±5″ | ±20″ |
轴线垂直度 | ±5″ | ±30″ |
转角范围 | 均为连续 | 均为连续 |
工作方式 | 位置、速率、仿真 | 位置、速率、仿真 |
转台重量 | 约1600kg | 定制 |
角位置测量精度 | ±3″ | ±10″ |
角位置测量重复性 | ±2″ | ±4″ |
角位置控制精度 | ±5″ | ±5″ |
速率范围 | 0.005° ~ 400°/S | 0.005° ~ 720°/S |
速率精度 | (2~5)×10-5 (360°平均) | (2~5)×10-5 (360°平均) |
导电环 | 40道×3A | 定制 |
五轴仿真转台的主要功能是实时模拟弹和目标在各种飞行状态下的姿态,并模拟弹和目标在飞行过程中的相互关系。五轴转台中用于模拟弹体三维姿态运动的三轴(方位、俯仰和横滚)称为内三轴,用于模拟弹目视线运动的二轴(方位和俯仰)称为外二轴。
技术特点
实时运动仿真
为保证五轴仿真转台运动的实时性,运动控制计算机采用基于PXI总线的运动控制器,确保试验管理计算机的控制指令能够以微秒级的速度下达到运动控制器,而运动控制器的伺服周期为62微秒到440微秒之间可调。
在仿真计算机(解算给出仿真指令)与主控计算机(仿真系统人机界面)之间通过分别安装在其内部的VMIC反射内存卡进行快速通信,以实现仿真指令的实时传输,其时延不到400纳秒。
采用RTX实时内核以实现主控计算对仿真指令的实时接收和下达。RTX 提供了对IRQ、I/O、内存的精确控制,以确保实时任务执行时具有100%的可靠性。RTX支持30KHz的持续中断触发速度,平均IST延迟小于1微秒。RTX与Windows 系统无缝的结合在一起,可以利用Windows 系统的各种优势。包括大量标准的API函数;高效的内存管理机制;以及各种Windows 下的通用资源。RTX最高支持1000个独立的进程,每个进程下可以运行的线程数不受限制。128个优先级可以满足几乎所有用户的编程需要,RTX调度器可以确保线程切换时间保持在500纳秒到2微秒之间。
多轴运动的耦合
由于内轴要求高转速、大加速度和快速响应。在其高速运时,由于陀螺效应,各轴的耦合比较严重,所以必须进行解耦设计和计算。
主要技术参数
仿真转台内三轴主要技术指标
横滚 | 俯仰 | 方位 | |
角位置精度 | ±5″(1σ) | ±5″(1σ) | ±5″(1σ) |
倾角回转误差 | ±5″ | ±5″ | ±5″ |
角度范围 | ±360° | ±360° | ±360° |
最大角速度 | 500°/s | 300°/s | 300°/s |
最小平稳角速度 | 0.001°/s | 0.001°/s | 0.001°/s |
最大角加速度 | 8000°/s2 | 4000°/s2 | 3000°/s2 |
频响(双十指标) | 15Hz(幅值±0.5°) | 12Hz(幅值±0.5°) | 10Hz(幅值±0.5°) |
负载重量 | ≤40kg | ||
负载尺寸 | φ300×600mm | ||
安装方式 | 导引头±40°范围内无遮挡 | ||
仿真转台外二轴主要技术指标
俯仰 | 方位 | |
角位置精度 | ±5″(1σ) | ±5″(1σ) |
倾角回转误差 | ±5″ | ±5″° |
角度范围 | -45°~+75° | ±60° |
最大角速度 | 100°/s | 100°/s |
最小平稳角速度 | 0.001°/s | 0.001°/s |
最大角加速度 | 1000°/s2 | 1000°/s2 |
频响(双十指标) | 5Hz(幅值±0.5°) | 5Hz(幅值±0.5°) |
负载重量 | ≤40kg | |
负载尺寸 | φ300×600mm | |
负载安装方式 | 适应现有目标模拟器的出瞳距离与结构要求,目标框前端面与三轴转台中心距离:600mm | |
其它:
当转台单轴运动时,其它各轴位置误差不大于相应的角位置精度指标。五轴可同时按照各轴最大角加速度的60%运动。
阶跃响应:各轴输入为5°阶跃信号时,超调量小于15%,当稳态精度为5%时,振荡次数小于2次。
五轴相交度:φ1mm
角位置传感器测量精度优于2″,分辨率优于0.36″。
内三轴横滚采用中空型电机,为负载提供圆筒形安装空间。
采用两台立式机柜,实现系统强电、弱电的分离。
电磁兼容性要求:
被试武器工作空间磁场强度不大于1奥斯特。
被试武器信号传输线路上不能产生峰值高于1V的脉冲干扰。
不影响武器系统数字信号的传输,数字信号接口包括RS232、RS485、CAN总线等。
六自由度液压摇摆台是一个由计算机实时控制并能提供俯仰、横滚、偏航、升降、纵向平移和侧向平移的六自由度运动仿真设备,它可作为飞行模拟器、坦克火炮模拟器、汽车模拟器、动感影院模拟平台等。该设备为六自由度并联机构,通过控制六只液压缸的长度,来实现台体姿态的变化。
采用并联式Stewart结构,控制计算机经过运动学分析(运动学位置反解),得出液压缸的运动指令,并生成控制指令,该控制指令由引动控制器经过信号调理后输出,控制伺服阀运动,最终控制液压缸的行程,即控制平台的姿态。六个油缸可在缸长方向作线性移动。平台正是通过六个油缸的协调动作来实现六个自由度运动。
技术特点
六自由度并联机构
采用液压伺服驱动
运动精度高、承载能力大
采用运动实时正解,保证台体运动精度
采用PXI总线测控技术
运动正解的实时解算
采用四元素表示角运动,简化了运动学解算方程,同时采用高速DSP技术,实现了台体的正向实时解算。保证计算精度达到10e-6的条件下,正向解算的速度达到每秒2600次。
控制参数的自适应调整
根据负载自动选择不同的最优参数组的方式确保系统在所有负载范围内均能达到动态特性和精度指标。
主要技术参数
项目 | 横摇(X向) | 纵摇(Y向) | 航偏(Z向) |
角度范围 | ≥±30° | ≥±30° | ≥±30° |
角位置精度 | ≤±0.06° | ≤±0.06° | ≤±0.06° |
最大角加速度 | ≥±150°/s2 | ≥±150°/s2 | ≥±150°/s2 |
最大角速度 | ≥±28°/s | ≥±28°/s | ≥±28°/s |
最大角加速度误差 | ≤5% | ≤5% | ≤5% |
位移范围 | ≥±0.8m | ≥±0.8m | ≥±0.8m |
线位置精度 | ≤±1mm | ≤±1mm | ≤±1mm |
最大线加速度 | ≥±0.5g | ≥±0.5g | ≥±0.5g |
最大线速度 | ≥±0.7m/s | ≥±0.7m/s | ≥±0.7m/s |
最大线加速度误差 | ≤5% | ≤5% | ≤5% |
负载重量 | ≤10T | ||
负载尺寸 | φ300×600mm | ||
负载安装方式 | 定制 | ||
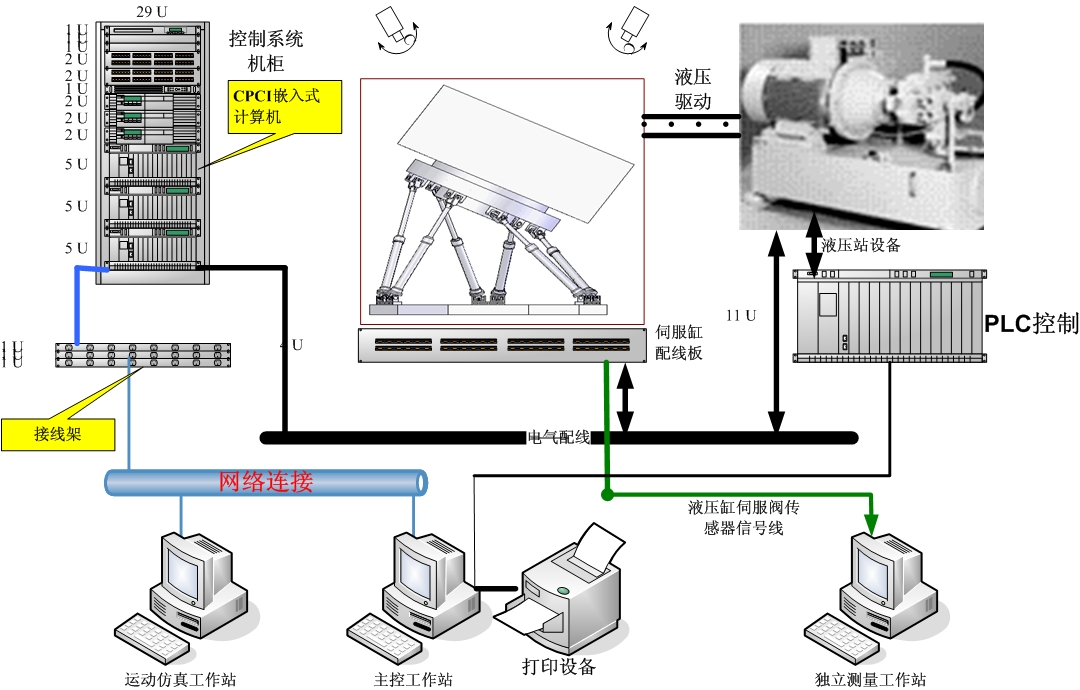
控制系统拓扑图

温控速率位置转台主要用于在高低温环境下测试惯性器件性能。
温控单轴速率位置转台系列技术指标
项目 | 指 |
承载能力 | ≥15kg |
台面直径 | ¢300mm |
转角范围 | 连续无限制 |
速度范围 | 0.1~600°/s |
速度精度 | ≤10°/s |
位置精度 | 20〃 |
工作方式 | 速率、位置 |
控制方式 | 自动、手动 |
滑环 | 50环/1A(可订做) |
箱体有效容积 | 450ⅹ450ⅹ450(mm) |
温控范围 | -55°~+80° |
温度均匀性 | ≤1.5℃ |
温度偏差 | ≤±0.5℃ |
升降温 | ± |
降温方式 | 液氮制冷 |
温控双轴速率位置转台系列技术指标
项目 | 方位 | 俯仰 |
定位精度 | ±3″ | ±3″ |
位置分辨率 | 0.36″ | 0.36″ |
位置定位重复性 | ±1″ | ±1″ |
倾角回转误差 | ±2″ | ±3″ |
最小速度 | 0.001°/s | 0.001°/s |
最大速度 | 400°/s | 100°/s |
速度分辨率 | 0.0002°/s | 0.0002°/s |
最大加速度 | 100°/s2 | 50°/s2 |
速率精度及 速率平稳性 | 5×10-5 (360°平均) | 5×10-5 ( |
两轴垂直度 | ±3″ | |
负载重量 | 35kg | |
温控范围 | -55°~+85° | |
温度测量精度 | ±1℃ | |
升降温度速率可控 | ≥2℃/min | |
无磁转台主要用于磁航向传感器的运动模拟,从单自由度到三自由度不等,可手动也可电动控制。主要运动部件、基础部件均采用铝合金或不锈钢材料,并且经过特殊处理;各轴的主体由刚性较好的炭素复合纤维、或热固性高温聚脂材料制成;主要非金属结构材料50年不降解,可保证长期使用后不变形。
三轴手动无磁转台系列技术指标
项目 | 指 | |
转角范围 | 俯仰 | 0-360º |
偏航 | 0-360º | |
滚转 | 连续旋转 | |
角位置控制精度 | ≤0.2 º | |
负载 | 0.5Kg | |
三轴电动无磁转台系列技术指标
项目 | 指标要求 | |
转角范围 | 俯仰 | 连续旋转 |
偏航 | 连续旋转 | |
滚转 | 连续旋转 | |
最大角 加速度 | 俯仰 | 180°/s2 |
偏航 | 180°/s2 | |
滚转 | 720°/s2 | |
最大角 速度 | 俯仰 | 60 rpm |
偏航 | 60 rpm | |
滚转 | 1200rpm | |
角速度输出精度 | ≤36” | |
角位置控制精度 |
| |
角位置测量重复性 | ≤30” | |
角速率平稳性 | 0.01°/s | |
负载重量 | ≥10Kg | |
负载直径 | Φ400 | |
磁场畸变 | 100mm处≤40nT | |
磁航向三轴转台系列技术指标
项目 | 滚转 | 俯仰 | 航向 |
转角范围 | 连续旋转 | ≤±80° | ≤±80° |
角位置测量精度 | ≤±0.1° | ≤±0.1° | ≤±0.1° |
最大角速度 | 70°/s | 70°/s | 70°/s |
最大角加速度 | 50°/s2 | 50°/s2 | 50°/s2 |
负载重量 | ≤0.5Kg | ||
转台
磁航向转台
跨超音速风洞六自由度(γ、α、β、X、Y、Z)机构是风洞CTS (Captive Trajectory System)试验必须的支撑设备。通过该机构使被测物体在六自由度方向的联动,用来预测外挂物从母机上分离的轨迹特性,及航空飞行器的各种飞行轨迹特性,包括飞行物的线速度、角速度、线加速度、角加速度、线位移和角位移以及气动载荷等参数随时间的变化。从而分析评估飞行器的设计参数,及外挂物分离对母机飞行的安全性影响。机构能进行位置控制下的CTS试验,进行速度控制下的CTS试验;能进行位置控制下的GRID试验,能进行速度控制下的GRID试验。可实现位置控制和速度控制,节省能耗,试验效率高,轨迹连续。
控制/测量系统完成由主控计算机、运动控制器、伺服/执行控制器和安全保护装置组成,完成试验中机构的运动控制。
技术特点:
系统能进行位置控制下的CTS试验
系统能进行速度控制下的CTS试验
系统能进行位置控制下的GRID测试试验
系统能进行速度控制下的GRID测试试验
CTS控制系统与风洞测控系统的计算机耦合,当风洞启动流场稳定后,风洞测控系统发出信号,CTS控制系统收到信号便启动控制系统进行所指定的CTS试验/GRID试验,试验完毕后即反馈信号给风洞测控系统以停止风洞试验。
CTS系统能与轨迹仿真系统交换数据,以将试验数据传送给轨迹仿真系统进行处理。
系统能按需要生成试验报告,并能对试验数据以数据库方式进行管理,以支持方便的数据查询和检索。

主要技术参数
项目 | 1.2m跨超音速风洞机构 | 2.4m跨超音速风洞机构 | 1.5m风洞CTS实验系统 | ||
运动范围 | X轴向 | 0~1000mm | 1800mm | 1400mm | |
Y轴向 | 0~800mm | 1700mm | ±500mm | ||
Z轴向 | 0~900mm | 1500mm | ±500mm | ||
俯仰角α | -45°~+45° | ±45° | ±45° | ||
偏航角β | -45°~+45° | ±45° | ±45° | ||
滚转角γ | -330°~+330° | ±330° | ±360° | ||
运动速度 | X轴向 | 0<V<100mm/s | 0<V<100mm/s | 0<V<100mm/s | |
Y轴向 | 0<V<100mm/s | 0<V<100mm/s | 0<V<100mm/s | ||
Z轴向 | 0<V<70mm/s | 0<V<70mm/s | 0<V<100mm/s | ||
俯仰角α | 0<V<20°/s | 0<ω<20°/s | 0<ω<25°/s | ||
偏航角β | 0<V<20°/s | 0<ω<20°/s | 0<ω<25°/s | ||
滚转角γ | 0<V<50°/s | 0<ω<50°/s | 0<ω<300°/s | ||
运动精度 | 线位移 | 无荷载 | 0.1mm | 0.1mm | 0.1mm |
有荷载 | 1.0mm | 1mm | |||
角位移 | 无荷载 | 3 | 3 | 3 | |
有荷载 | 6 | 6 | |||
最大气 动载荷 | 侧向力 | 900N | 400N | ||
法向力 | 1200N | 400N | |||
轴向力 | 600N | 60N | |||
俯仰力矩 | 12Nm | ||||
偏航力矩 | 12Nm | ||||
滚转力矩 | 10Nm | ||||
堵塞度 | 实验段 | 0.7% | 0.8% | 0.5% | |
超扩段 | 7% | 5.5% | 7% | ||
低速风洞多功能支撑机构为六自由度(α、β、γ、X、Y、Z)机构,主要用于低速风洞常规测力以及测压试验、具备开展张线测力(测压)试验、喷流实验、活动地板试验、动导数试验、PIV试验和PDPA试验等特种试验能力。机构采用基于PXI总线的测控系统,可实现运动的自动控制,并可以实现任意三个轴的组合联动,使模型按照给定的轨迹运动。
技术特点
模型载荷以及气动载荷大,最大推力达20吨;
运动范围大,最大达3100mm;
采用液压伺服和机电伺服同时使用;
模块化设计,安装拆卸非常方便;
采用PXI总线测控技术。
运动通过计算机自动控制完成,运动速度在要求范围内可任意设定。
可实现任意三个自由度轴联动,保证运动过程中模型参考中心 位置保持不变或沿给定的轨迹变化;
系统能实时反馈各个自由度的实际位置

主要技术指标
项目 | 3.2m多功能支撑系统 | 8m低速风洞尾撑系统 | 机翼大迎角系统 | ||
运动范围 | X轴向 | 0~3100mm | |||
Y轴向 | 0~2450mm | ±900mm | |||
Z轴向 | 0~3000mm | 8.6m | -500~1000mm | ||
俯仰角α | -180°~+180° | -45°~+45° | -30°~+110° | ||
偏航角β | -45°~+45° | -30°~+30° | -45°~+45° | ||
滚转角γ | -180°~+180° | -180°~+180° | |||
运动速度 | X轴向 | 0<V<200mm/s | |||
Y轴向 | 0<V<200mm/s | ||||
Z轴向 | 0<V<200mm/s | 0.5m/s | |||
俯仰角α | 0<V<2°/s | 0°/s~5°/s | 0<ω<3°/s | ||
偏航角β | 0<V<2°/s | 0°/s~5°/s | 0<ω<2°/s | ||
滚转角γ | 手动 | ||||
运动精度 | 线位移 | 无荷载 | 0.1mm | ±1mm | ±5mm |
有荷载 | |||||
角位移 | 无荷载 | 3 | ±0.02° | ±0.5 | |
有荷载 | |||||
最大气 动载荷 | 侧向力 | ±12.5 kN | ±1200N | ||
法向力 | -15~+65 kN | ±7000N | |||
轴向力 | -7.5~12.5 kN | ±1200N | |||
俯仰力矩 | ±14 kNm | ±1000Nm | |||
偏航力矩 | ±12 kNm | ±600Nm | |||
滚转力矩 | ±15 kNm | ±600Nm | |||
堵塞度 | 实验段 | 0.5% | ≤3.5% | 5% | |
超扩段 | |||||
模型参数 | 模型展长 | ≤6m(典型展长5.2m) | |||
最大机翼面积 | ≤3m2 | ≤2m | |||
最大重量 | 1500Kg~2000Kg | ≤2000N | |||
动态旋翼模型试验台是直升机旋翼在风洞内进行实验的支撑平台,该平台为六自由度机构,该机构可实现直升机旋翼的滚转、俯仰、偏航、升降、前后平移及侧移六个自由度,可完全模拟直升机的飞行过程,以取得直升机旋翼的最佳的气动数据。该实验台采用基于VXI总线的测控系统,可实现直升机旋翼运动的自动控制,完成实验所需的各种运动。
技 术特点
术特点
机构速度及响应要求高
运动范围大
各自由度采用串联设计
机构刚性要求高
采用VXI总线测控技术
主要技术指标
项目 | 动态旋翼模型试验台 | |
运动范围 | X轴向 | 0~300mm |
Y轴向 | -300~+700mm | |
Z轴向 | -500~+500mm | |
俯仰角α | -30°~+45° | |
偏航角β | -60°~+60° | |
滚转角γ | -60°~+60° | |
运动速度 | X轴向 | 0<V<500mm/s |
Y轴向 | 0<V<200mm/s | |
Z轴向 | 0<V<200mm/s | |
俯仰角α | 0<V<5°/s | |
偏航角β | 0 | |
滚转角γ | 0<V<10°/s | |
运动精度 | 线位移 | 0.1mm |
角位移 | 0.1° | |
固有频率 | 避开10~80HZ | |
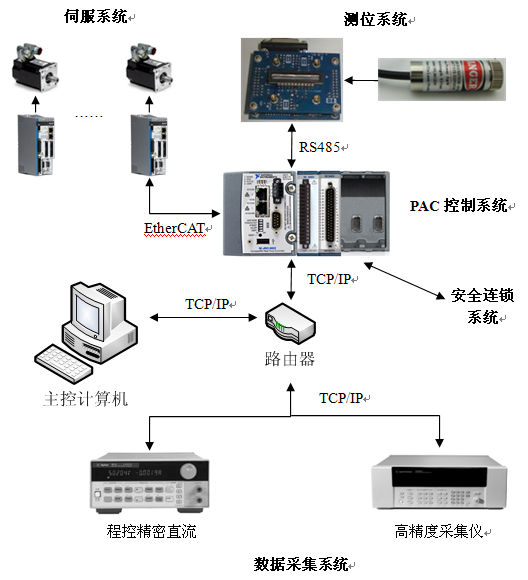
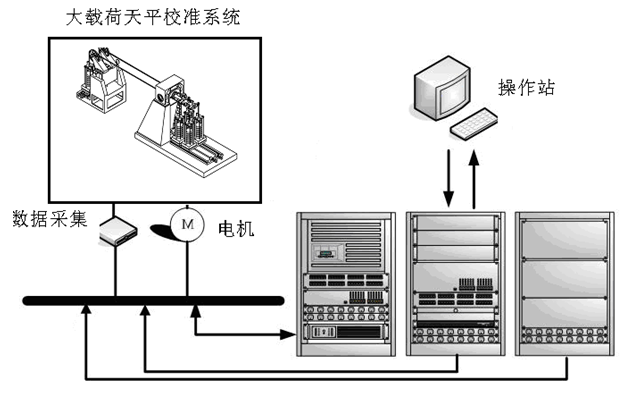
六分量天平静校系统由砝码加载系统、六自由度复位机构、测控系统及CCD位置检测系统等组成,用于对加载头施力实现天平六分量综合加载。机械系统完成对天平三个方向的力和力矩的精确加载和天平受载变形的精确复位;控制系统完成砝码加载、天平复位的运动控制;采集系统完成天平信号的数据采集。
电气控制系统主要由PAC控制系统,测位系统,伺服系统,数据采集系统,安全连锁系统以及主控计算机组成。PAC控制系统为控制核心,其上运行高可靠性的实时系统,能保证试验流程稳定执行。测位系统采用CCD非接触式测量,完成天平控制位置的测量。伺服系统由伺服电机及驱动器组成,提供平台运动和加载功能数据采集系统由高精度直流电源以及高精度采集仪组成,提供天平供电和天平信号采集的功能。安全连锁系统主要由接近开关以及一些功能触点组成,提供机构运动超限保护、供电回路安全联动等保护功能。
主要技术指标
项目 | 六分量天平静校系统 | 大载荷天平校准系统 | |
静校载荷范围 | 轴向载荷 |
| 60000N |
法向载荷 |
| 85000N | |
侧向载荷 |
| ||
俯仰力矩 |
| 30000 N×m | |
偏航力矩 |
| ||
滚转力矩 |
| 5000 N×m | |
天平安装平台位移范围 | 轴向 | 0~1600mm | |
法向 | ±200mm | ||
侧向 | ±100mm | ||
俯仰角度 | ±5° | -5°~5° | |
偏航角度 | ±5° | ||
滚转角度 | ±180° | 0°~360° | |
复位运行速度 | 俯仰角速度 | ≤1°/s | |
滚转角速 | ≤3°/s | ||
天平安装平台重复定位精度 | 线位移 | ≤0.01mm | |
角位移 | ≤10″ | ||
角位移分辨率 | ≤1″ | ||
施力误差 | ≤0.05% | ||
数采系统测量误差 | ≤0.01%FS | ||
控制系统对天平和数据的干扰 | ≤0.01%FS | ||
静校系统总体精度 | ≤0.08% | ≤0.08% | |
弹丸静态特征量测量系统主要用于炮弹、火箭弹和各种制导弹药的质量、质心、弹长、弹径、偏心、摆差和极(赤)转动惯量的测量,它是以VXI总线的虚拟仪器技术为核心的机电一体化测控产品,是集控制与测量于一体自动化测量系统。全系统包括控制/测量子系统、数据处理/分析子系统、机械执行机构、其它外围部件,系统全模块化,并采用可靠成熟的VXI技术,确保系统具有高的精确性、可靠性、稳定性、安全性和可维护性。由硬件完成驱动与信号传感,软件完成定位、测量、计算、标定、补偿、显示、存盘、数据查询与报告等,实现自动化测量。同时,系统具有自校准和辅助诊断功能。
采用三点法或刀口法利用空间力和力矩平衡原理实现质量、质心、偏心测量,转动惯量测量利用弹性器件对被测物绕旋转轴作往返扭摆运动,通过测量样柱和被测物的旋转周期,可计算出被测物的转动惯量。
测量与控制系统由主控计算机、VXI数据采集系统、运动控制器、多路继电器开关、伺服/执行控制器和安全保护装置组成,实现自动化测量。
技术特点
测量控制系统与机械执行机构系统的计算机耦合,减少人为干扰。
机械执行机构系统高集成化,使多种物理参数能在同一测量装置上进行测量,一套系统能实现多台测量装置驱动。
在控制系统设计中,采用可靠成熟的VXI技术,确保系统的可靠性。
标准化的基于VXI总线的测量和调理前端
支持用户再开发,扩展系统功能
系统易于标定和校准。
由于计算机采用权限管理,可以完全杜绝非法操作。


主要技术参数
项目 | 三点式系列 | 刀口式系列 | |
炮弹 | 质量 | 200g至64kg | 200g至80kg |
口径 | 20mm至155mm | 25mm至155mm | |
长度 | 50mm至1200mm | 50mm至900mm | |
质量测量精度 | ≤0.04%F.S | ≤0.02%F.S | |
质心测量精度 | ≤0.1mm | ≤0.1mm | |
偏心测量精度 | ≤0.01mm | ≤0.01mm | |
转动惯量测量精度 | ≤1%(与标准样柱相比) | ≤1%(与标准样柱相比) | |
中小口径火箭弹/导弹 | 质量 | 500g至75kg | 1.2Kg至150Kg |
口径 | 40mm至130mm | 60mm至180mm | |
长度 | 400mm至3500mm | 500mm至2700mm | |
质量测量精度 | ≤0.04%F.S | ≤0.02%F.S | |
质心测量精度 | ≤0.1mm(>40kg时,≤0.2mm) | ≤0.2mm | |
偏心测量精度 | ≤0.01mm(>40kg时,≤0.02mm) | ≤0.02mm | |
弹长测量精度 | ≤1000mm时,≤0.02mm (>1000mm时,≤1‰) | ||
弹径测量精度 | ≤0.01mm(定心部位), ≤0.02mm(其他部位) | ||
摆差测量范围 | 0~5mm | ||
摆差测量精度 | ≤0.01mm | ||
转动惯量测量精度 | ≤1%(与标准样柱相比) | ||
大口径火箭弹 | 质量 | 400Kg至1000Kg | |
口径 | 270mm至400mm | ||
长度 | 4700mm至7600mm | ||
质量测量精度 | ≤0.02%F.S | ||
质心测量精度 | ≤1mm | ||
偏心测量精度 | ≤0.05mm | ||
弹长测量精度 | |||
弹径测量精度 | |||
摆差测量范围 | |||
摆差测量精度 | |||
转动惯量测量精度 | ≤1%(与标准样柱相比) | ||

bwin·必赢(中国)唯一官方网站版权所有 苏ICP备11037185号-1
地址:中国·四川·成都·金牛区土桥金周路999号bwin必赢国际第五教学楼A座 | 邮编:610039 | 邮箱:xhujx@mail.xhu.edu.cn | 联系电话:028-87720507
 级
级 标要求
标要求 0Kg
0Kg 级
级 标要求
标要求 5℃/min
5℃/min
 标要求
标要求
 <V<5°/s
<V<5°/s